ISO 26262 - Software Safety Mechanism 개념, 구현 사례, 장단점 정리
1. 개요
자동차 전자제어 시스템이 복잡해짐에 따라, 하드웨어적인 안전 대책(이중화, 보호회로 등)만으로는 충족되지 않는 부분이 늘어나고 있습니다. 이에 소프트웨어 레벨에서도 안전 기법을 적용해 하드웨어 고장 및 오동작에 대처하고, 시스템 전체의 무결성과 가용성을 높이는 것이 필수가 되고 있습니다.
이 글에서는 지난 포스팅에서 나열했던 센서·액츄에이터·제어기·메모리·통신 각각의 Software Safety Mechanism을 실제 개발 현장에서 어떻게 구현할 수 있는지 사례와 함께 살펴보겠습니다.
ISO 2626 - 하드웨어 구성 요소 별 소프트웨어 안전 메커니즘 분류
1. 개요: 왜 Software Safety Mechanism이 중요한가?ISO 26262는 자동차 전장품의 기능안전을 규정하는 국제 표준이며, 전자 제어 시스템에서 발생할 수 있는 위험을 체계적으로 파악하고 방지하는 데 초점
ji-se.tistory.com
2. 센서(Sensor) Software Safety Mechanisms
2.1 Failure Detection by On-line Monitoring
- 개념: 센서 입력 값을 실시간으로 읽어들여, 정상 범위를 벗어나거나 일정 기간 업데이트가 없는 경우 고장을 감지
- 구현 사례:
- ADC(Analog-to-Digital Converter) 기반 센서: 소프트웨어가 정기적으로 센서 값을 읽고, 미리 설정된 최소/최대 한계를 벗어나면 에러 플래그를 설정
- 펄스 신호 센서(예: 휠 스피드 센서): 펄스가 일정 주기 이상 미갱신 시 ‘No signal’로 판단
- 장점:
- 구현이 비교적 간단하고, 거의 모든 종류의 센서에 적용 가능
- 빠른 고장 감지(실시간)
- 단점:
- 미세한 드리프트(drifts)나 간헐적 에러를 포착하기 위해서는 추가 로직(히스테리시스, 필터링 등)이 필요
- 센서 자체 고장 외에 커넥터 느슨함, 노이즈 등 간접 원인은 정확히 구분하기 어려움
2.2 Input Comparison / Voting (1oo2, 2oo3 등)
- 개념: 여러 센서를 중복 배치하고, 소프트웨어적으로 입력 값을 비교·투표하여 대표값을 결정
- 1oo2(one out of two): 2개 센서 중 하나라도 정상 범위를 벗어나면 오류
- 2oo3(two out of three): 3개 센서 중 2개가 일치하면 정상, 1개는 오탐 가능
- 구현 사례:
- 브레이크 페달 센서 2중화: 둘 중 하나의 출력이 비정상이면 시스템은 즉시 브레이크 안전 모드로 전환
- 스티어링 토크 센서 3중화: 세 센서를 교차 비교하여 다수결로 신뢰도를 결정
- 장점:
- 하드웨어 고장 하나만으로 전체 시스템이 다운되지 않음(고장 허용도 상승)
- 비교 로직이 명확해 디버깅이 용이
- 단점:
- 센서가 여러 개 필요하므로 비용과 공간이 증가
- 소프트웨어 비교 로직이 복잡해질 수 있으며, 투표 전략에 따른 추가 설계 노력이 필요
2.3 Sensor Valid Range
- 개념: 센서 값이 물리적으로 불가능한 범위를 나타낼 경우 소프트웨어에서 즉시 에러 처리
- 구현 사례:
- 온도 센서: -50°C ~ 150°C 사이에 있어야 하며, 이를 벗어나면 센서 고장 플래그
- 유량 센서: 0~100 L/min 범위를 넘어서는 값은 소프트웨어에서 ‘Invalid’ 처리
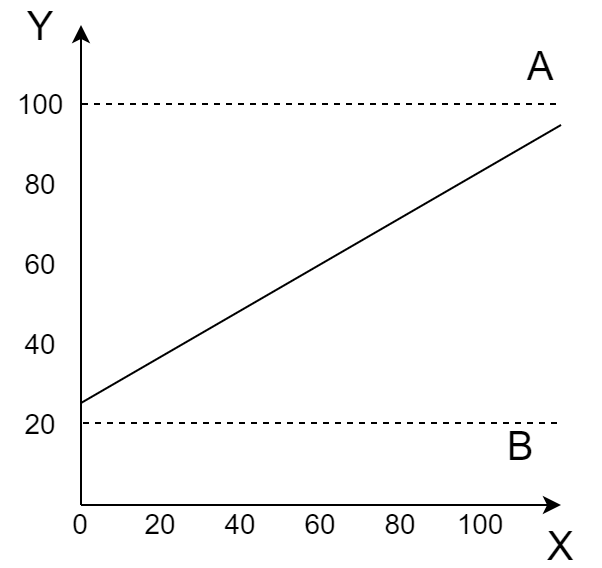
X : 물리적 센서 값 Y : 측정된 센서 값 (전압 관점) A : 범위를 벗어난 값 (high) B : 범위를 벗어난 값 (low)
- 장점:
- 기본적이면서도 강력한 방어 기법
- 센서 드라이버 레벨에서 바로 적용 가능
- 단점:
- 센서 오류 상황이 실제로 범위 내로 가짜 입력을 내보낼 경우(노이즈 등) 검출 못함
- Valid Range 설정이 부정확하면 정상값도 차단할 위험
2.4 Sensor Rationality Check
- 개념: 센서 여러 개의 상호 연관 관계(‘합리성’)를 검사하여 비정상적 상황을 감지
- 구현 사례:
- 차량 속도 vs 엔진 RPM: 특정 기어 단에서 속도와 RPM이 불일치하면 이상으로 판단
- 브레이크 압력 vs 브레이크 스위치: 압력이 높아지면 스위치도 ON 상태가 되어야 함
- 장점:
- 단일 센서가 이상치가 아니더라도, ‘논리적 불일치’로 고장을 조기 감지 가능
- 고장 진단 범위를 넓힐 수 있음
- 단점:
- 관련 센서들이 모두 정확히 동작한다는 전제 필요
- 부정확한 모델(논리 관계 설정) 시 오검출 가능성이 큼
3. 액츄에이터(Actuator) Software Safety Mechanisms
3.1 Failure Detection by On-line Monitoring
- 개념: 액츄에이터(모터, 밸브, 솔레노이드 등)의 목표값(명령)과 실제 응답(피드백) 신호를 비교
- 구현 사례:
- 전동 파워 스티어링(EPS): 모터 목표 토크와 실제 전류, 속도 센서 등을 비교해 이상 여부 판단
- 스로틀 밸브: 명령각 vs 실제 각도 센서 차이가 일정 범위 이상 발생하면 오류
- 장점:
- 액츄에이터의 동작 오류를 직접 검출 가능
- 소프트웨어 관점에서 구현이 비교적 단순(명령 vs 피드백 비교)
- 단점:
- 피드백 센서 자체가 고장나면 해석 어려움
- 미세한 편차(장비 특성, 온도 변화 등)를 허용하기 위해 필터·파라미터 튜닝 필수
3.2 Monitoring (Coherence Control)
- 개념: 액츄에이터가 달성해야 할 물리적 상태와 현재 시스템 상태 간 ‘일관성’을 지속 검증
- 구현 사례:
- 브레이크 시스템: 하이드롤릭 압력이 올라가면 차량 감속도 또한 자연스럽게 증가해야 함.
불일치 시 브레이크 액츄에이터 고장 가능성
- 브레이크 시스템: 하이드롤릭 압력이 올라가면 차량 감속도 또한 자연스럽게 증가해야 함.
- 장점:
- 실제 동작 결과와 시스템 반응을 종합적으로 확인
- 단순 명령-피드백 비교보다 더 넓은 맥락 검사 가능
- 단점:
- 차량 주행 상황(도로 상태, 하중 등)에 따라 액츄에이터 효과가 달라질 수 있어, ‘기준 모델’ 설정이 복잡
4. 제어기(ECU) Software Safety Mechanisms
4.1 Self-test by Software (One Channel, 제한된 패턴)
- 개념: 소프트웨어가 자체적으로 알고리즘 몇 가지를 수행해, ECU 프로세서나 주변장치의 정상 동작 여부를 간단히 점검
- 구현 사례:
- 시스템 부팅 시(POST, Power-On Self Test): CPU 레지스터, 메모리 일부, 주변 IP(Core) 테스트
- 주기적 루틴: 특정 계산(예: CRC, 산술 연산) 결과를 미리 알고 있는 참값과 비교
- 장점:
- 추가 하드웨어 없이도 기본적인 이상 여부 확인 가능
- 부팅 시점에 자동으로 오류를 걸러낼 수 있음
- 단점:
- 테스트 패턴이 제한적이라, 모든 고장을 커버하기 어려움
- 실행 시간 증가 및 시스템 응답 지연 가능성
4.2 Self-test by Cross Exchange (독립된 2개 유닛 간 상호 검증)
- 개념: 이중화된 ECU(또는 서로 다른 코어) 간에 데이터를 교환하고 연산 결과를 비교해 이상 여부를 판단
- 구현 사례:
- 듀얼코어 MCU: 코어 A와 코어 B가 같은 계산을 수행한 뒤 결과를 서로 교환·검증
- 이중 ECU 구성: 주 ECU와 백업 ECU가 상호 모니터링
- 장점:
- 한 유닛에서 발생한 오류를 다른 유닛이 잡아낼 수 있어 고장 검출률 향상
- 두 유닛이 독립적으로 동작하므로, 한쪽이 실패해도 다른 쪽이 안전 모드를 유지 가능
- 단점:
- 하드웨어 이중화(또는 듀얼코어) 필요 → 비용 증가
- 통신/데이터 교환 로직이 복잡
4.3 Software Diversified Redundancy (단일 하드웨어 채널에서 SW 중복)
- 개념: 동일 하드웨어에서 기능이 다른(또는 코드 구조가 다른) 2가지 소프트웨어를 동시에 돌려 결과를 비교
- 구현 사례:
- Safety related SW Component: 동일 기능을 알고리즘 구현 방식을 다르게(예: 정수 연산 vs 부동소수 연산, 다른 Compiler) 하여 ‘공통 원인 오류’를 줄임
- 장점:
- 하드웨어 중복 없이도 SW 레벨에서 다양성(분산)을 확보
- 공통 결함이 아니라면, 한 소프트웨어 오류를 다른 쪽이 검출
- 단점:
- 코드 작성 및 유지보수 비용이 크게 증가
- 동일 요구사항을 두 번 구현하므로 개발 시간·테스트 노력 배가
4.4 Reciprocal Comparison by Software (상호 비교)
- 개념: 소프트웨어 내 여러 모듈 또는 태스크가 동일 연산을 각각 수행하고, 결과를 서로 비교
- 구현 사례:
- 실시간 태스크 A, B가 같은 센서 데이터를 처리해 제어값을 계산, 결과가 불일치하면 에러
- 장점:
- 동일 하드웨어 채널 내에서도 프로그램 상위 레벨에서 오류 검출 가능
- 단점:
- 모듈 분리가 확실해야 하며(독립된 실행 경로), 각 모듈 간 상관관계가 있어야 함
4.5 Stack Over/Underflow Detection
- 개념: 런타임 중 소프트웨어 스택 영역이 설정 범위를 벗어나서(Overflow) 다른 데이터 영역을 침범하거나, 반대로 거의 사용되지 않을(Underflow) 경우를 감지
- 구현 사례:
- ‘Stack Sentinel’ 삽입: 스택 상·하단에 마커(특정 패턴)를 심어두고, 주기적으로 검사해 패턴이 바뀌면 Stack Error로 판단
- 장점:
- 프로그래밍 에러(재귀 호출 폭주, 배열 인덱스 오류 등)로 인한 메모리 침범을 조기에 발견
- 단점:
- 시점에 따라 검사해야 하므로, 실시간 성능 소폭 저하
- 마커 오염 시 false positive 발생 가능
4.6 Watchdog
- 개념: 소프트웨어가 일정 주기로 ‘생존 신호(Heartbeat)’를 보내지 않으면 시스템이 멈췄다고 판단해 리셋(또는 안전 동작)
- 구현 사례:
- HW Watchdog: 일정 타이머 내에 소프트웨어에서 Clear Signal을 주지 않으면 MCU 강제 리셋
- SW Watchdog: 소프트웨어 간 상호 모니터링(타이머 체크)
- 장점:
- 프로그램 무한 루프나 교착 상태(Deadlock) 등 치명적 오류에 대한 빠른 대응
- 구현이 비교적 간단하고 효과가 큼
- 단점:
- 오작동 시 불필요한 리셋으로 시스템 신뢰도 저하
- Watchdog 자체가 멈추는 경우 별도 대책 필요
4.7 Monitoring of Programme Sequence
- 개념: 소프트웨어가 지정된 실행 순서(상태 머신, 함수 호출 시퀀스)를 준수하는지 지속적으로 검사
- 구현 사례:
- SW 흐름 제어: 특정 함수가 호출된 후 정해진 함수가 반드시 이어져야 하며, 그렇지 않을 경우 로직 위반으로 간주
- 장점:
- 복잡한 소프트웨어 구조 내 비정상 흐름을 조기에 감지
- 단점:
- 상태/흐름 모델링이 잘 되어 있어야 하며, 상태 폭발(복잡도 증가) 위험
5. 메모리(Memory) Software Safety Mechanisms
5.1 RAM Test
- 개념: 부팅 시 혹은 주기적으로 RAM 영역 일부/전체에 테스트 패턴을 쓰고 읽어들여 결함 검출
- 구현 사례:
- Bootloader 단계: RAM 전역 테스트, 결함 발생 시 부팅 중단 또는 안전 모드
- 주기적 스케줄링: 미사용 RAM 영역을 분할 테스트
- 장점:
- 물리적/논리적 메모리 불량을 사전에 식별 가능
- 단점:
- 테스트 시간, 실행 중 메모리 사용 제약 존재
- 일부 결함(간헐적 에러)은 놓칠 수 있음
5.2 Parity Bit / Checksum / CRC
- 개념: 메모리에 저장된 데이터를 읽고 쓸 때, 추가적인 에러 검출 코드(Parity, Checksum, CRC)를 활용해 무결성 확인
- 구현 사례:
- Flash 메모리에 섹터 단위로 CRC 첨부, 주기적으로 읽어서 비교
- RAM 변수에도 Checksum을 함께 기록
- 장점:
- 간단한 소프트웨어 로직으로 데이터 손상 여부를 빠르게 판별
- 단점:
- ECC만큼의 자동 수정 기능은 제공하지 못함(주로 검출 목적)
- 오버헤드(메모리 공간, 계산 시간) 증가
5.3 Block Replication (복제)
- 개념: 중요한 데이터를 여러 블록에 중복 저장하여, 한 블록이 손상되면 다른 블록에서 복원
- 구현 사례:
- EEPROM 백업: 주기적으로 동일 데이터를 여러 영역에 복제 저장
- 장점:
- 신뢰성 높은 데이터 유지(특히 전원 꺼질 때도)
- 단순 구현으로도 이중화 효과 얻을 수 있음
- 단점:
- 저장 공간 및 쓰기 횟수 부담(특히 EEPROM/Flash 제한)
- 동기화 로직이 필요
5.4 Memory Monitoring using ECC (Error Correction Codes)
- 개념: ECC를 통해 단일 비트 오류는 자동으로 수정, 다중 비트 오류는 감지
- 구현 사례:
- ECC 내장 RAM/Flash: 하드웨어적으로 ECC를 지원하는 MCU/메모리 사용, 소프트웨어가 주기적으로 에러 카운터를 읽고 관리
- 장점:
- 1비트 오류는 실시간 수정 가능(Soft Error 방어)
- 안전성 극대화, 특히 ASIL D 수준 시스템에서 자주 쓰임
- 단점:
- 하드웨어 측 지원이 필요(별도 설계)
- ECC 계산 오버헤드 (대규모 메모리일수록)
6. 통신(Communication) Software Safety Mechanisms
6.1 Information Redundancy (값 검사)
- 개념: 통신 메시지에 반복 데이터, Checksum/CRC 등을 포함해 전송 도중 손상이나 변조를 검사
- 구현 사례:
- CAN 통신: CAN 프로토콜 자체의 CRC 외에, 상위 프로토콜이 추가로 Checksum/Sequencing 처리
- Ethernet AVB/TSN: 패킷 헤더에 버전·타임스탬프·해시 값 등을 삽입해 무결성 검증
- 장점:
- 통신 라인 잡음이나 오류에 강인성 확보
- 프로토콜 계층에서 쉽게 적용 가능
- 단점:
- 메시지 길이가 늘어나 대역폭 사용량 증가
- 소프트웨어 연산(Checksum/CRC) 부담 증가
6.2 Frame Counter (순서 검사)
- 개념: 연속적으로 송신되는 프레임에 순번(카운터)을 매겨, 누락·재전송·순서 뒤바뀜 등을 감지
- 구현 사례:
- ADAS 센서 데이터 전송 시 프레임 번호를 삽입, 수신 측에서 번호가 어긋나면 로스트 패킷 처리
- 장점:
- 데이터 유실이나 지연, 맥락 위배 등을 소프트웨어적으로 즉시 파악
- 단순하면서도 효과적
- 단점:
- 순번 영역 크기(오버플로 가능성), 통신 지연 등에 대한 예외 처리 필요
- 소프트웨어 설계·해석 로직 추가
7. 결론
위에서 살펴본 다양한 Software Safety Mechanism은 실제 차량 시스템에서는 복합적으로 적용됩니다. 예를 들어, ECU 내에서는 Watchdog + Programme Sequence Monitoring + CRC 검증 등을 모두 쓰고, 센서·액츄에이터 레벨에서는 On-line Monitoring과 Rationality Check를 동시에 수행하기도 합니다.
주요 고려사항:
- ASIL 요구사항: 고신뢰가 필요한 ASIL D 영역은 이중화/Redundancy나 ECC 등 고장허용도 높은 기법을 적극 적용
- 시스템 리소스 한계: ECU 처리 성능, 메모리 용량, 통신 대역폭 등을 고려해 적절한 기법 선택
- 개발 비용·시간: 소프트웨어 중복 구현(Software Diversified Redundancy) 등은 개발 부담이 크므로, 효과 대비 비용 분석 필수
- Test & Verification: 안전 메커니즘 자체도 철저히 검증해야 하며, 단위 테스트/통합 테스트/하드웨어-인-더-루프(HIL) 시나리오에서 기능·성능 확인
결국, 하드웨어 고장으로 인한 위험이 소프트웨어적으로도 충분히 모니터링·완화될 수 있도록 다층 방어(Defense in Depth)를 구축해야 ISO 26262가 요구하는 안전 목표를 달성할 수 있습니다.